В очередной задаче для обзора - 802. Find Eventual Safe States нам предстоит найти вершины, не попадающие в циклы графа.
📋 Описание задачи
Нужно определить безопасные вершины в ориентированном графе.
- Безопасная вершина — это такая вершина, из которой невозможно попасть в цикл. Если из вершины можно попасть только в терминальные вершины или другие безопасные, она считается безопасной.
- Граф представлен в виде списка смежности, где
graph[i] содержит все вершины, в которые можно попасть из вершины i.
- Вернуть необходимо список всех безопасных вершин в возрастающем порядке.
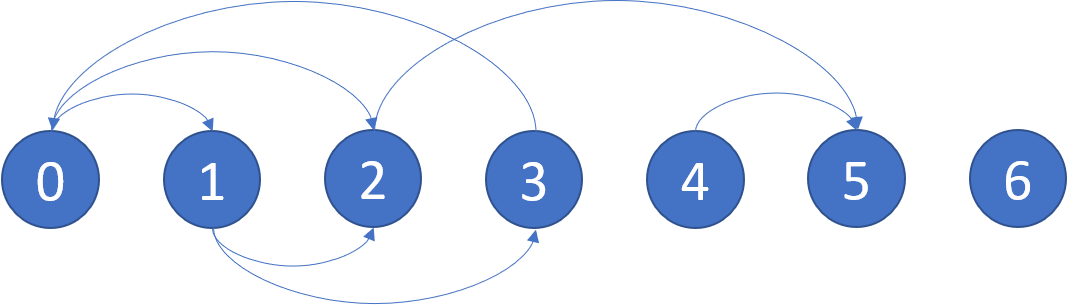
- Граф из примера имеет безопасными вершины:
[4,5,6]
💡 Идея
Задача решается с помощью обхода графа в глубину (DFS) и вектора состояний.
Каждому узлу присваивается одно из трёх состояний:
Unseen (ещё не обработан);Processing (в процессе обработки; узлы, являющиеся частью цикла, остаются в этом состоянии и после обработки);Safe (безопасный).
🔍 Детальное описание подхода
-
Инициализация состояний:
- Каждый узел изначально находится в состоянии
Unseen.
-
Реализация DFS:
- При посещении узла он помечается как
Processing, чтобы отметить, что он в процессе обработки.
- Рекурсивно проверяются все соседи узла:
- Если сосед ещё не обработан (
Unseen), запускается его обработка через DFS.
- Если сосед находится в состоянии
Processing, это указывает на цикл, и текущий узел считается небезопасным.
- Если сосед уже безопасен (
Safe), проверка продолжается.
- Если все соседи узла безопасны, узел помечается как
Safe.
-
Сбор безопасных узлов:
- После завершения обработки всех узлов, те из них, которые находятся в состоянии
Safe, добавляются в результат.
📊 Асимптотика
- Время:
O(V + E), где V — количество вершин, E — количество рёбер. Каждый узел и каждое ребро обрабатываются ровно один раз.
- Память:
O(V) — для массива node_state и стека рекурсии.
💻 Исходный код
#[derive(Copy, Clone, PartialEq)]
enum NodeState {
Unseen,
Processing,
Safe,
}
impl Solution {
pub fn eventual_safe_nodes(graph: Vec<Vec<i32>>) -> Vec<i32> {
let n = graph.len();
let mut node_state = vec![NodeState::Unseen; n]; // Track the state of each node
// Filter nodes that are determined to be safe
(0..n)
.filter(|&i| Self::dfs(i, &graph, &mut node_state))
.map(|i| i as i32)
.collect()
}
fn dfs(node: usize, graph: &[Vec<i32>], node_state: &mut [NodeState]) -> bool {
if NodeState::Unseen == node_state[node] {
node_state[node] = NodeState::Processing; // Mark the node as being processed
// Check all neighbors
for &neighbor in &graph[node] {
let neighbor = neighbor as usize;
// If any neighbor is unsafe, the current node is unsafe
if !Self::dfs(neighbor, graph, node_state) {
return false;
}
}
// Mark the node as safe after processing all neighbors
node_state[node] = NodeState::Safe;
}
// Return true if the node is safe
matches!(node_state[node], NodeState::Safe)
}
}
Tags: #rust #algorithms #graph #dfs